17
Notice de mise en œuvre du multicoptère QR X350 Pro FPV RTF réf. WK2200
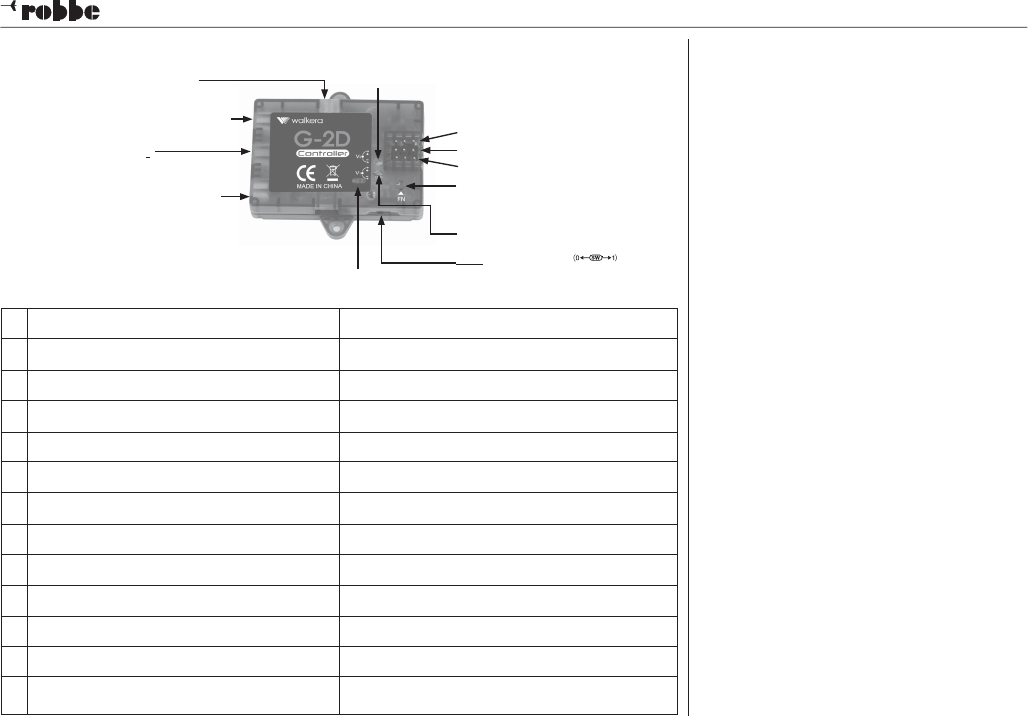
16.4 Structure de la commande G-2D 16.4.1 Affichage d'état
tMPSTRVFMBEJPEFEhÏUBUDMJHOPUFFOSPVHFMBDPNNBOEFTF
trouve en phase d'initialisation, ne déplacez pas et ne tou-
chez pas le système Gimbal pendant l'initialisation.
tƋ-PSTRVFMBEJPEFEhÏUBUFTUBMMVNÏFFOWFSUDFMBTJHOJmF
que l'initialisation est achevée et que le système Gimbal est
en ordre de marche.
16.4.2 Mise au point de la position initiale des axes
Avec les potentiomètres V1 et V2 sur la commande G-2D il
est possible d'établir séparément les positions initiales des
axes de roulis et de tangage que la commande stabilise de
manière autonome:
tMPSTRVFMF TZTUÒNF(JNCBMEPJU ThJODMJOFS WFST MF CBT TVS
son axe de roulis, déplacez le potentiomètre V1 dans le
sens contraire des aiguilles d'une montre, et dans le sens
contraire lorsqu'il doit s'incliner vers le haut.
tMPSTRVF MF TZTUÒNF (JNCBM EPJU ThJODMJOFS WFSTMB HBVDIF
sur son axe de roulis, déplacez le potentiomètre V1 dans le
sens contraire des aiguilles d'une montre, et dans le sens
contraire lorsqu'il doit s'incliner vers le droite.
16.5 Fonctions de protection
t1SPUFDUJPODPOUSFMFTDPVSUTDJSDVJUTMPSTRVFMhVOEFTNP-
teurs est en court-circuit la commande le coupe automati-
quement. On évite ainsi d'endommager la commande. La
fonction de protection n'est supprimée que lorsque le prob-
lème est résolu et que l'alimentation a été rétablie.
t1SPUFDUJPODPOUSFMFTTVSDIBSHFTMPSTRVFMhVOEFTNPUFVST
tourne trop vite à cause de déplacements de compensation
initiés par la commande ou la compensation, la commande
arrête immédiatement le moteur pour éviter toute détéri-
oration du cordon. Le moteur n'est remis en marche que
lorsque le problème a été résolu et que le moteur tourne
dans sa gamme de vitesses habituelle (Cf. Point 16.2 Spé-
cifications → Angle d'attaque max.)
"MJNFOUBUJPOÏMFDUSJRVF108&3
3. Raccordement du moteur axe de roulis
30--.05
5. Potentiomètre V2 (V2)
7PJF"69"69TVQFSnV
5PVDIFEFQSPHSBNNB-
tion (FN)
(superflue)
11. Curseur
(superflu)
12. Diode d'état (rouge/verte/jaune )
1. Raccordement du moteur axe de
UBOHBHF1*5.05
2. Branchement gyroscope
(GYRO)
7. Voie de roulis (ROLL)
7PJFEFUBOHBHF1*5
10. Potentiomètre V1 (V1)
Voie de branchement G-2D
#SBODIFNFOUEVNPUFVSBYFEFUBOHBHF1*5.05
Branchement gyroscope (GYRO)
#SBODIFNFOUEVNPUFVSBYFEFSPVMJT30--.05
"MJNFOUBUJPOÏMFDUSJRVF108&3
Potentiomètre V2 (V2)
7PJF"69"69
Voie de roulis (ROLL)
7PJFEFUBOHBHF1*5
5PVDIFEFQSPHSBNNBUJPO'/
Potentiomètre V1 (V1)
Curseur
Diode d'état (rouge/verte/jaune )
Fonction
Connexion vers le moteur de l'axe de tangage.
Connexion vers le gyroscope
Connexion vers le moteur de l'axe de roulis
Connexion avec la source d'alimentation (accu ou modèle)
Potentiomètre de mise au point de la direction de base de l'axe de roulis
(superflu)
$POOFYJPOWFSTMFWPJF"69EVSÏDFQUFVS
$POOFYJPOWFSTMFWPJF"69PV"69EVSÏDFQUFVS
(superflu)
Potentiomètre de mise au point de la direction de base de l'axe de tangage
(superflu)
indique l'état actuel de l'unité de commande
1
2
3
4
5
6
7
8
9
10
11
12