1
Periodically move the throttle stick to full and back down to ensure proper servo settings.
2
It is critical that dials A and C be centered when the pitch and throttle curves are setup.
81
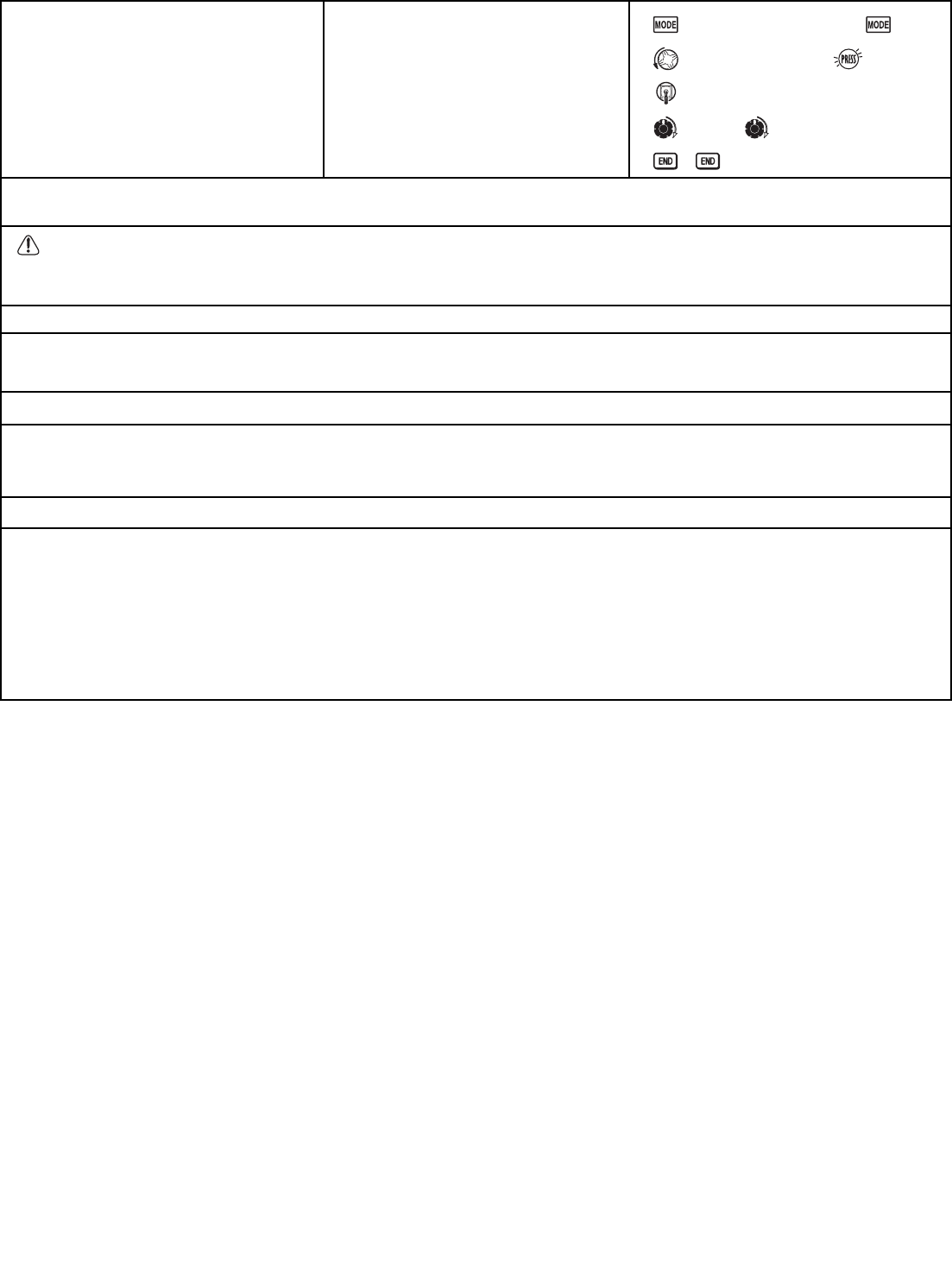
Learn how to operate HOVERING PITCH
and HOVERING THROTTLE. See p. 93.
Notice at half throttle, the VR(C) dial
adjusts the throttle separately from the
pitch. VR(A) adjusts the pitch
separately from the throttle.
for 1 second.
(If ADVANCE, again.)
1 step to SERVO.
throttle to center
VR(C) VR(A) center dials.
Be sure to follow your model’s instructions for preflight checks, blade tracking, etc. Never assume a set of blades are
properly balanced and will track without checking.
Check receiver battery voltage! Always check voltage with a voltmeter prior to each and every engine start.
(Never assume being plugged in all night means your radio gear is ready to fly). Insufficient charge, binding servo linkages,
and other problems can result in a dangerous crash with the possibility of injury to yourself, others and property.
Confirm the swashplate is level at 0 travel. Adjust arms if needed.
Apply full collective and check that the swashplate remained level and there is no binding. Repeat for full cyclic pitch and
roll. If not, adjust as needed to correct in END POINT: see p. 32.
Important note: prior to setting up throttle hold, idle-ups, offsets, etc, be sure to get your normal condition operating properly.
Where next?(Other functions you may wish to set up for your model.)
THROTTLE HOLD: P. 88.
SUB-TRIM p. 42 and separate trims for conditions (OFFSETS): p. 91.
Governor setup: p. 97.
IDLE-UP p. 90.
DELAYS to ease servo response when switching idle-ups: p. 92.
Rudder-to-throttle and other programmable mixes p. 60.
Checking setup prior to going airborne: Check voltage! Then, with the assistance of an instructor, and having completed
all range checks, etc, gradually apply throttle until the helicopter becomes “light on the skids.” Adjust trims as needed to
correct for any roll, pitch, or yaw tendencies. If the tail “wags,” the gyro gain is too high. Decrease gyro gain.